Featured Publications
For the full publication list, please see my Google scholar. :)
Preprints
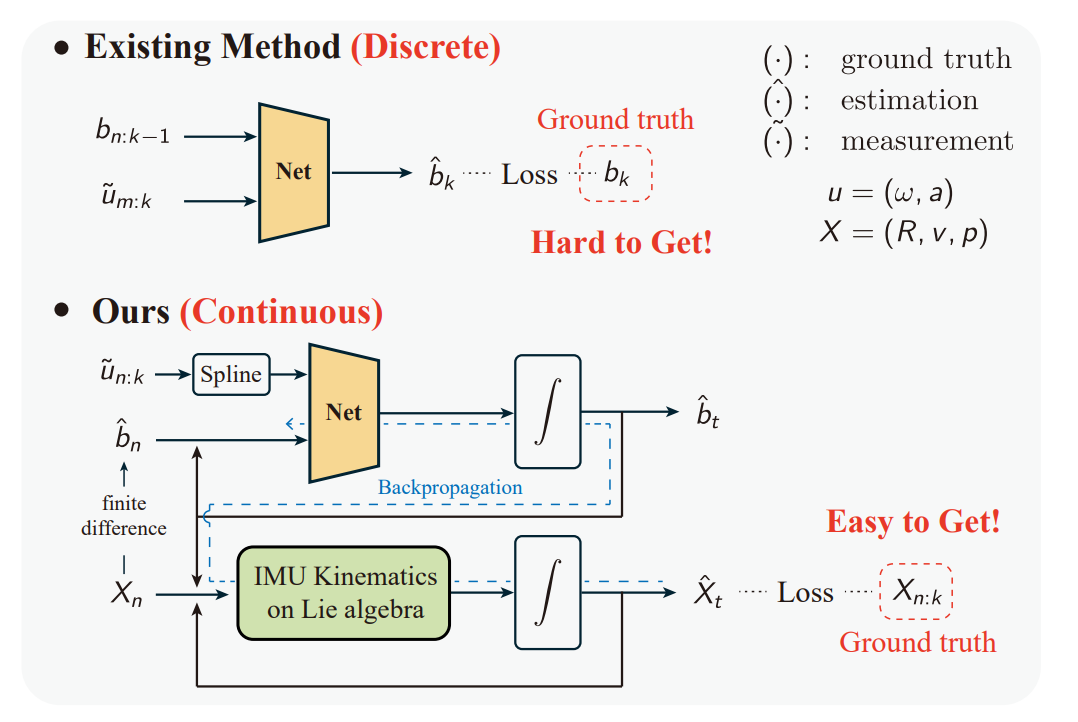 | Debiasing 6-DOF IMU via Hierarchical Learning of Continuous Bias Dynamics Ben Liu, Tzu-Yuan Lin, Wei Zhang, Maani Ghaffari arXiv (Accepted for RSS!), 2025 |
 | Proprioceptive Invariant Robot State Estimation Tzu-Yuan Lin, Tingjun Li, Wenzhe Tong, and Maani Ghaffari arXiv (Under Review), 2025 |
Journal Articles
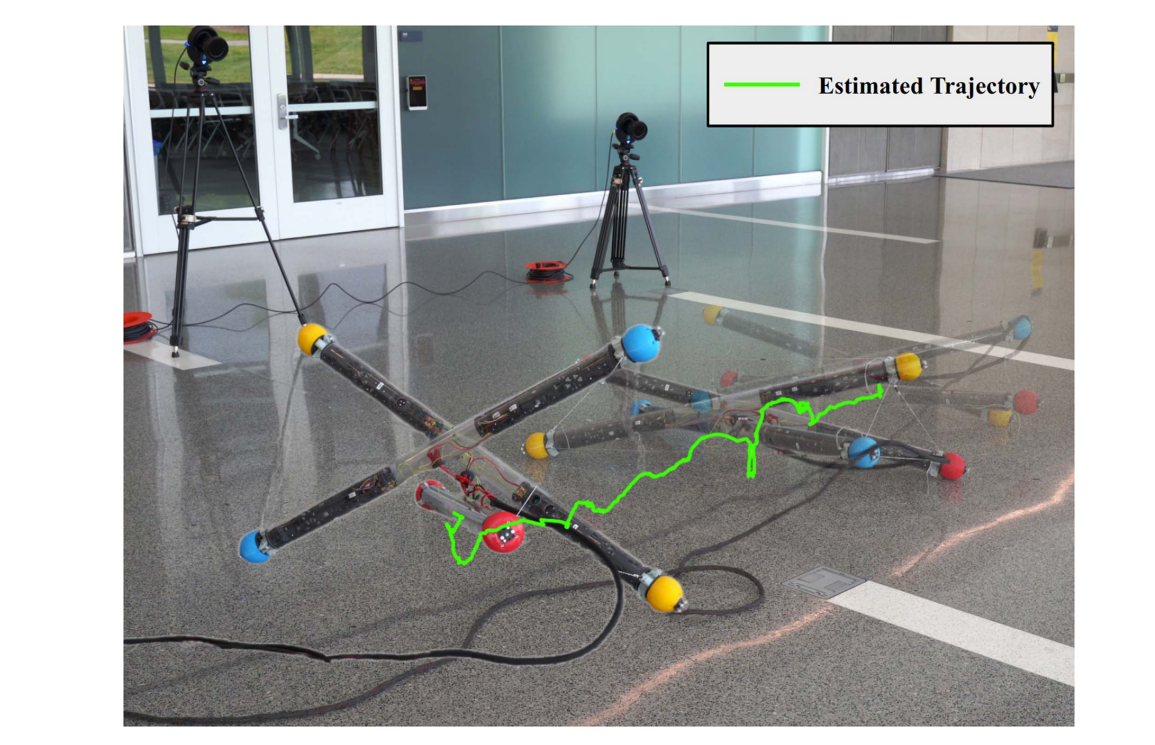 | Tensegrity Robot Proprioceptive State Estimation With Geometric Constraints Wenzhe Tong, Tzu-Yuan Lin, Jonathan Mi, Yicheng Jiang, Maani Ghaffari, Xiaonan Huang IEEE Robotics and Automation Letters (RA-L), 2024 |
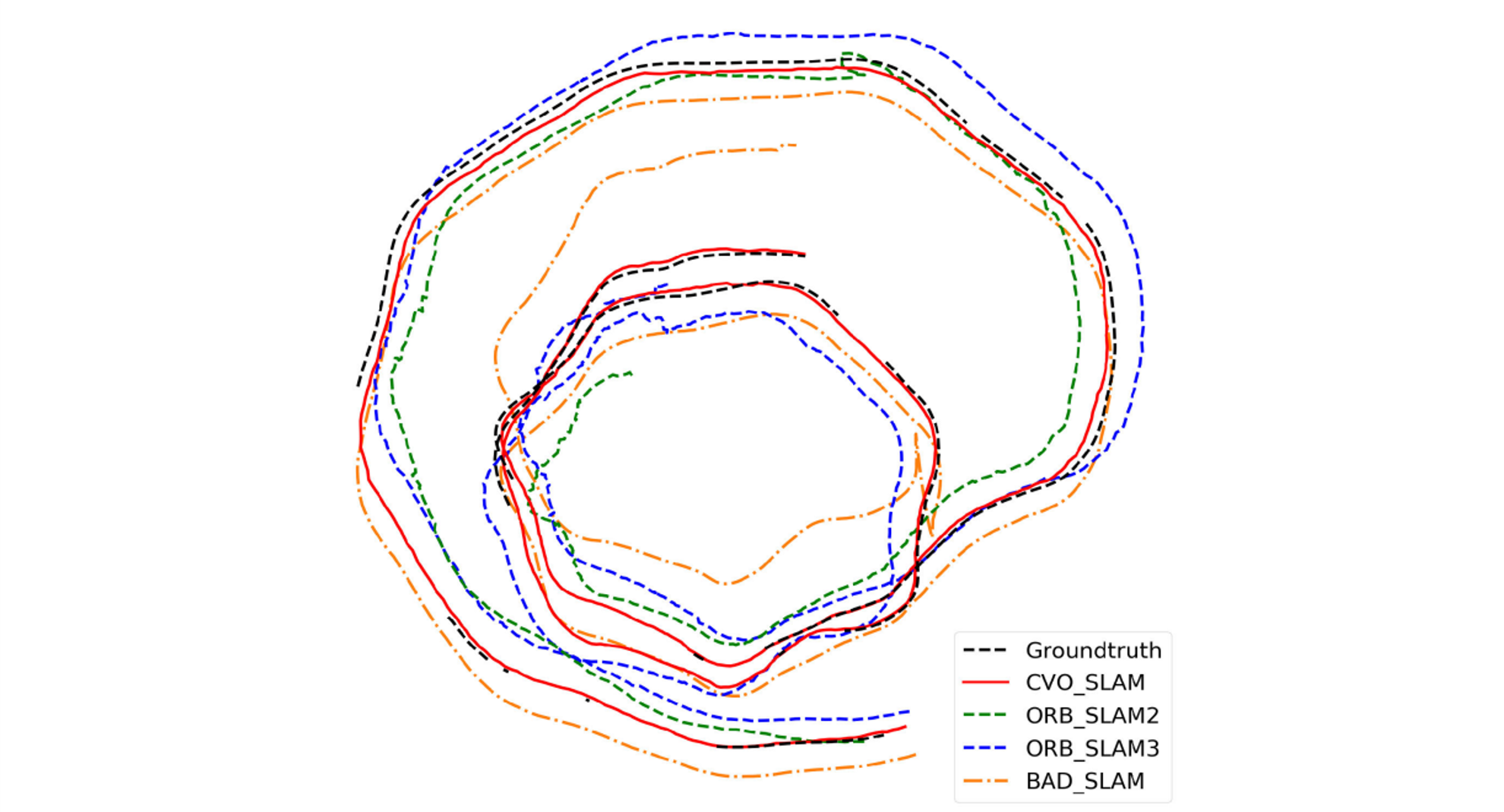 | A Robust Keyframe-Based Visual SLAM for RGB-D Cameras in Challenging Scenarios Xi Lin, Yewei Huang, Dingyi Sun, Tzu-Yuan Lin, Brendan Englot, Ryan M Eustice, Maani Ghaffari IEEE Access, 2023 |
 | Progress in symmetry preserving robot perception and control through geometry and learning Maani Ghaffari, Ray Zhang, Minghan Zhu, Chien Erh Lin, Tzu-Yuan Lin, Sangli Teng, Tingjun Li, Tianyi Liu, and Jingwei Song Frontiers in Robotics and AI, 2022 |
Refereed Conference Papers
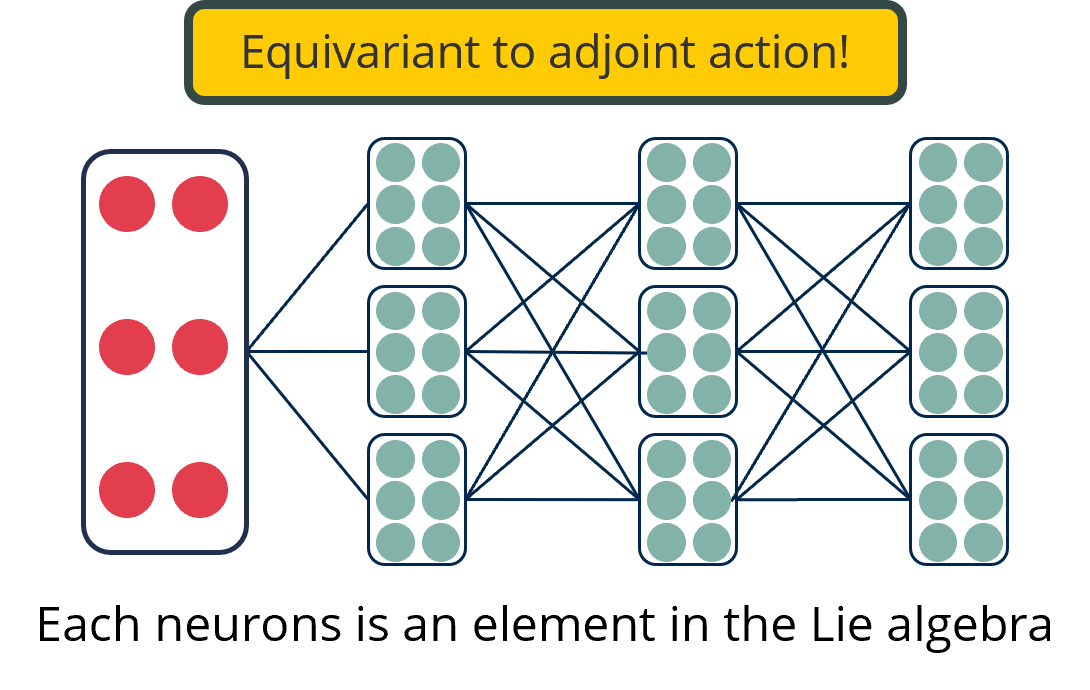 | Lie Neurons: Adjoint-Equivariant Neural Networks for Semisimple Lie Algebras Tzu-Yuan Lin, Minghan Zhu, and Maani Ghaffari International Conference on Machine Learning (ICML), 2024 |
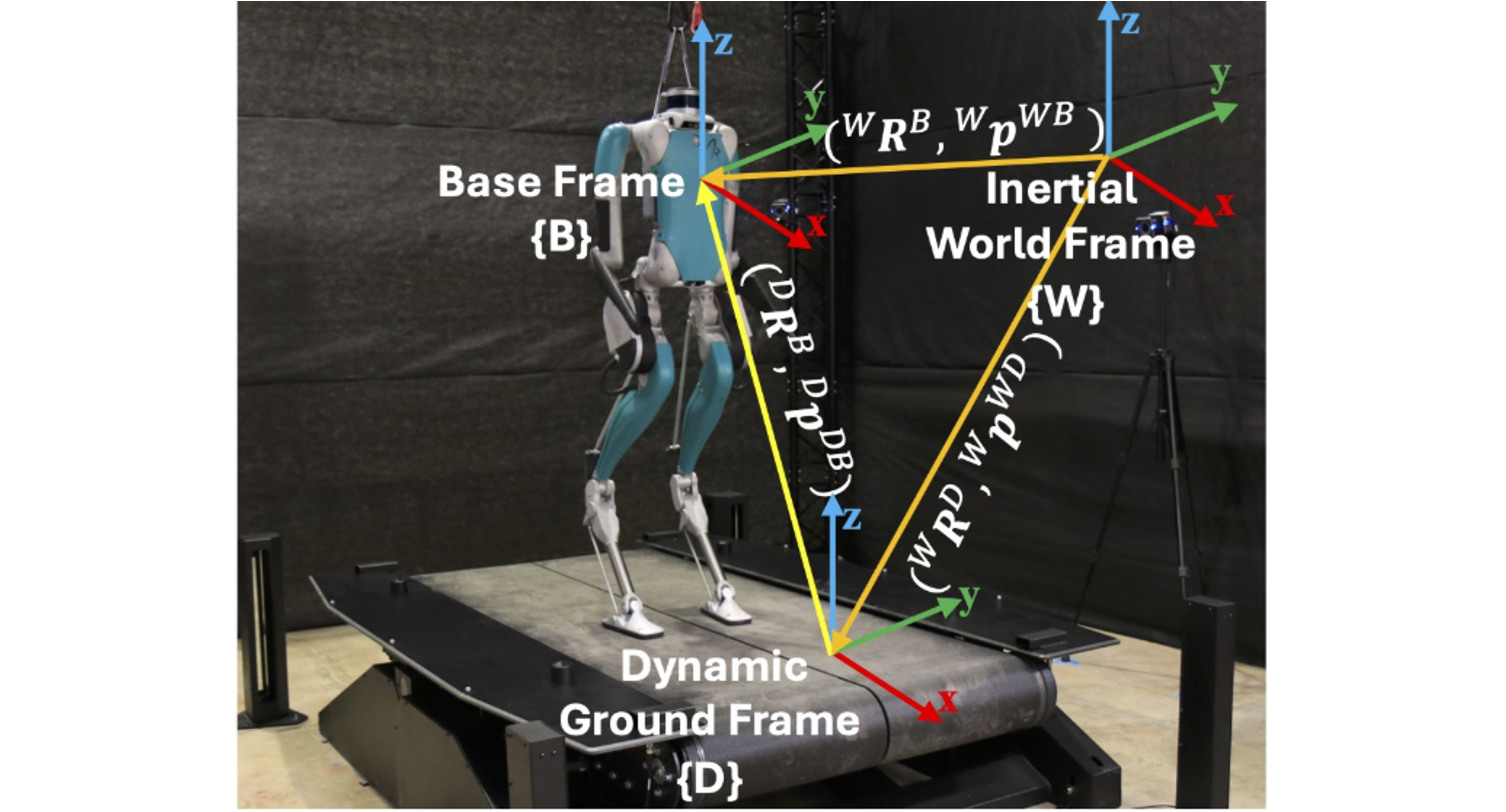 | Legged Robot State Estimation within Non-inertial Environments Zijian He, Sangli Teng, Tzu-Yuan Lin, Maani Ghaffari, and Yan Gu IEEE Conference on Decision and Control (CDC), 2024 |
 | Fully Proprioceptive Slip-Velocity-Aware State Estimation for Mobile Robots via Invariant Kalman Filtering and Disturbance Observer Xihang Yu, Sangli Teng, Theodor Chakhachiro, Wenzhe Tong, Tingjun Li, Tzu-Yuan Lin, Sarah Koehler, Manuel Ahumada, Jeffrey M. Walls, and Maani Ghaffari IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023 |
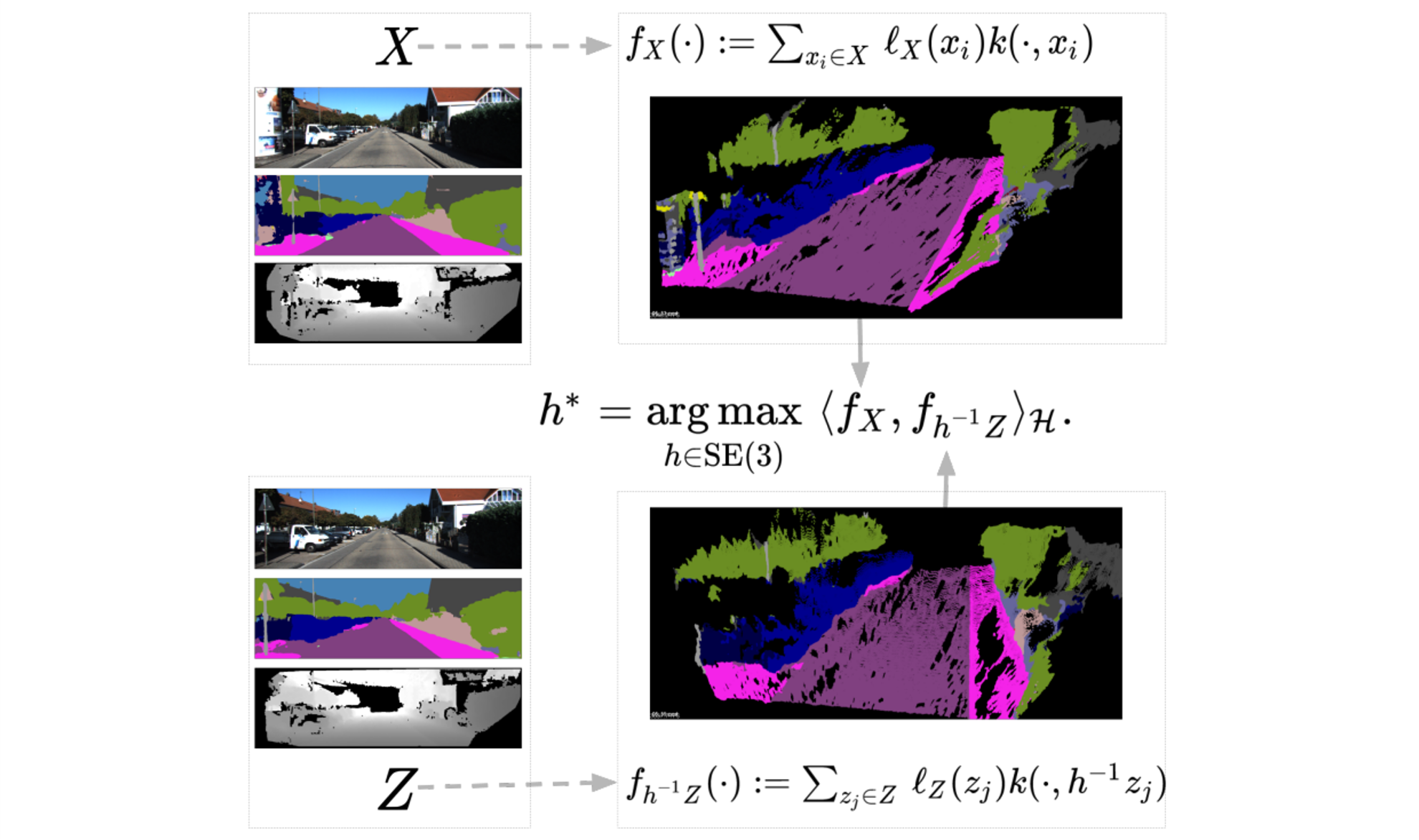 | A New Framework for Registration of Semantic Point Clouds from Stereo and RGB-D Cameras Ray Zhang, Tzu-Yuan Lin, Chien Erh Lin, Steven A. Parkison, William Clark, Jessy W. Grizzle, Ryan M. Eustice, Maani Ghaffari IEEE International Conference on Robotics and Automation (ICRA), 2021 |
 | Legged Robot State Estimation using Invariant Kalman Filtering and Learned Contact Events Tzu-Yuan Lin, Ray Zhang, Justin Yu, and Maani Ghaffari Conference on Robot Learning (CoRL), 2021 |
