Featured Publications
For the full publication list, please see my Google scholar. :)
 | Point2Pose: Occlusion-Recovering 6D Pose Tracking and 3D Reconstruction for Multiple Unknown Objects Via 2D Point Trackers Tzu-Yuan Lin, Ho Jae Lee, Kevin Doherty, Yonghyeon Lee, Sangbae Kim |
 | Hierarchical Reactive Grasping via Task-Space Velocity Fields and Joint-Space Quadratic Programming Yonghyeon Lee*, Tzu-Yuan Lin*, Alexander Alexiev, Sangbae Kim IEEE International Conference on Robotics and Automation (ICRA), 2026 |
 | High-Bandwidth Tactile-Reactive Control for Grasp Adjustment Yonghyeon Lee*, Tzu-Yuan Lin*, Alexander Alexiev, Sangbae Kim IEEE International Conference on Robotics and Automation (ICRA), 2026 |
 | A Survey of Legged Robotics in Non-Inertial Environments: Past, Present, and Future I-Chia Chang, Xinyan Huang, Tzu-Yuan Lin, Sangli Teng, Wenjing Li, Maani Ghaffari, Jingang Yi, Yan Gu |
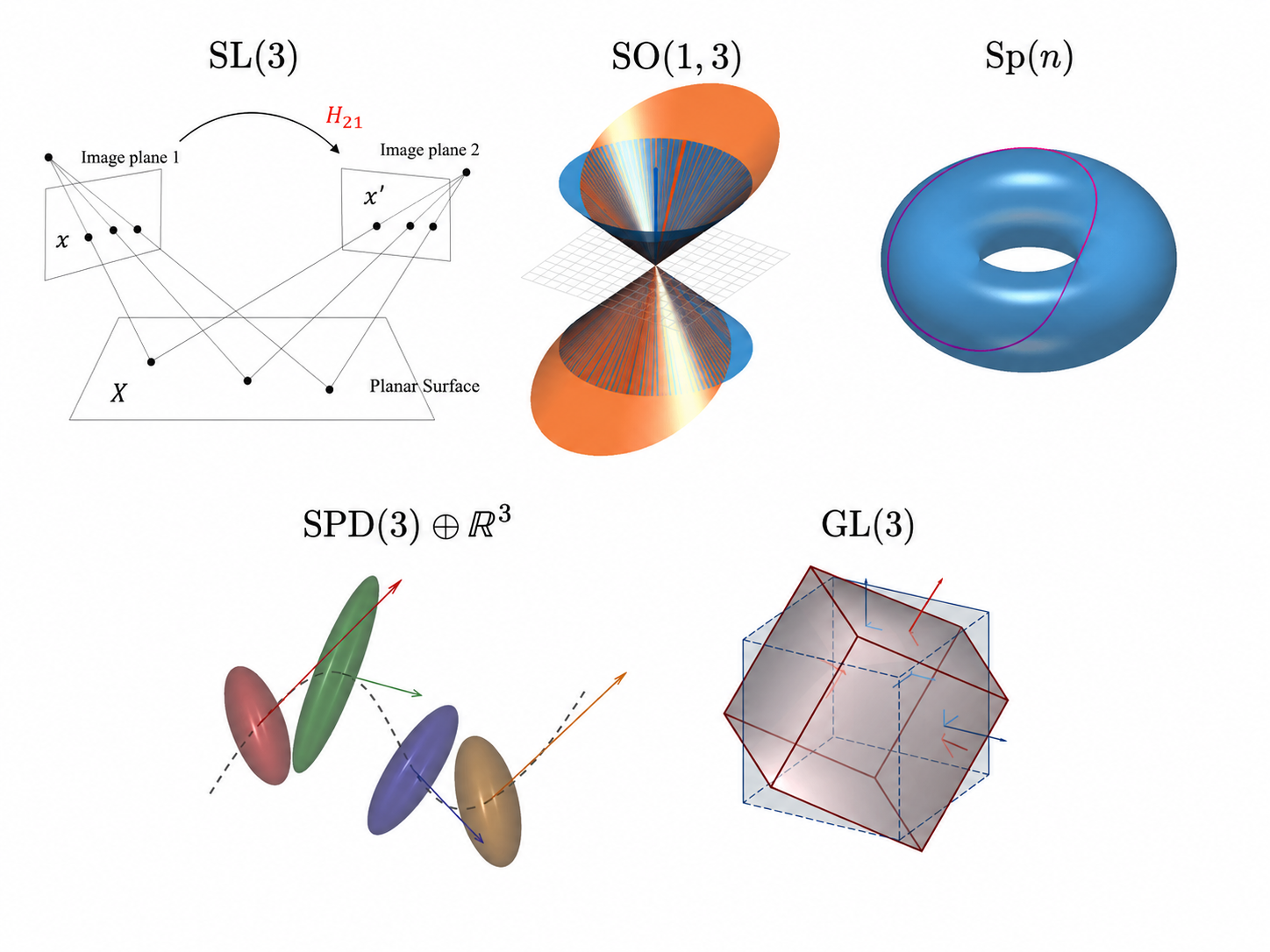 | Equivariant Neural Networks for General Linear Symmetries on Lie Algebras Chankyo Kim*, Sicheng Zhao*, Minghan Zhu, Tzu-Yuan Lin, Maani Ghaffari International Conference on Machine Learning (ICML), 2026 |
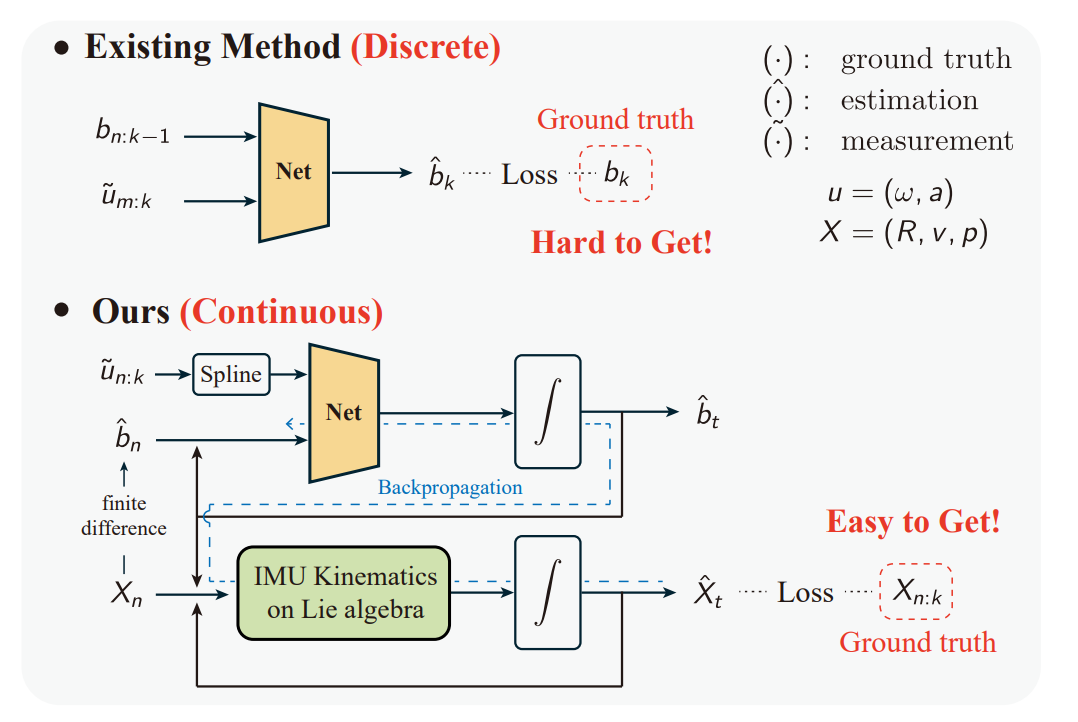 | Debiasing 6-DOF IMU via Hierarchical Learning of Continuous Bias Dynamics Ben Liu, Tzu-Yuan Lin, Wei Zhang, Maani Ghaffari Robotics: Science and Systems (RSS), 2025 |
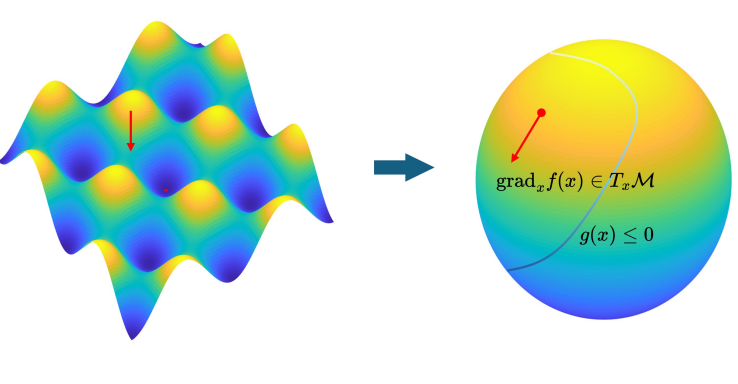 | Riemannian Direct Trajectory Optimization of Rigid Bodies on Matrix Lie Groups Sangli Teng, Tzu-Yuan Lin, William A Clark, Ram Vasudevan, Maani Ghaffari Robotics: Science and Systems (RSS), 2025 |
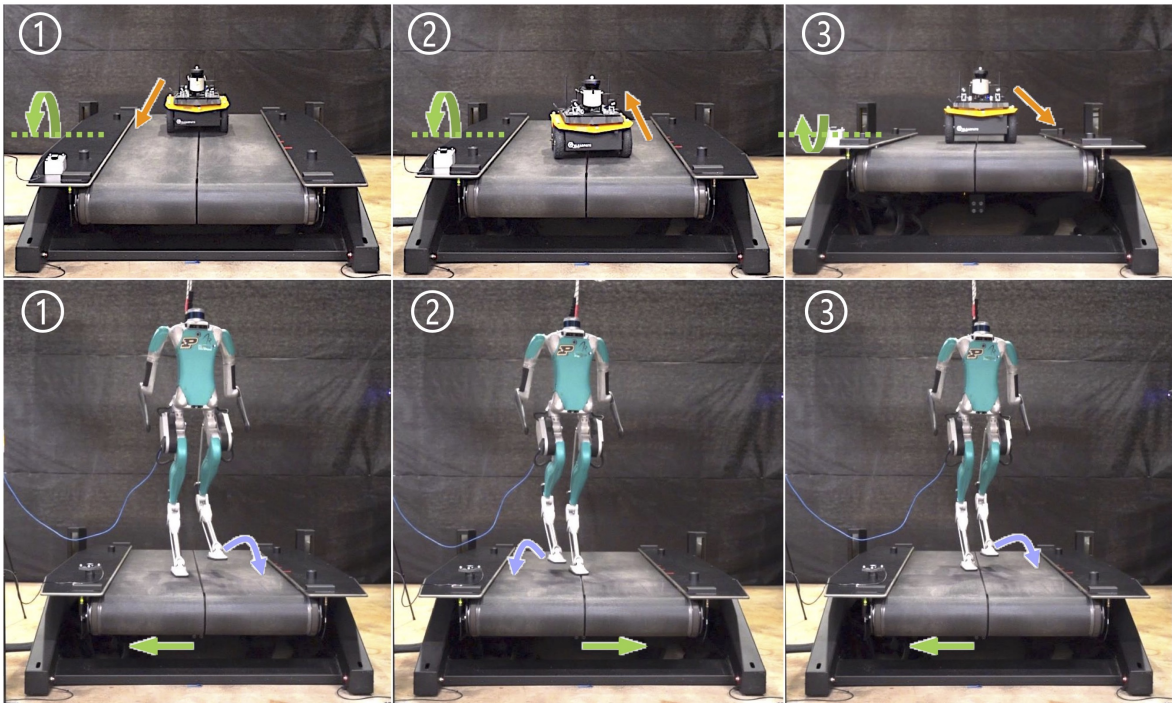 | Invariant Filtering for Full-State Estimation of Ground Robots in Non-Inertial Environments Zijian He, Sangli Teng, Tzu-Yuan Lin, Maani Ghaffari, Yan Gu IEEE/ASME Transactions on Mechatronics, 2025 |
 | Proprioceptive Invariant Robot State Estimation Tzu-Yuan Lin, Tingjun Li, Wenzhe Tong, and Maani Ghaffari |
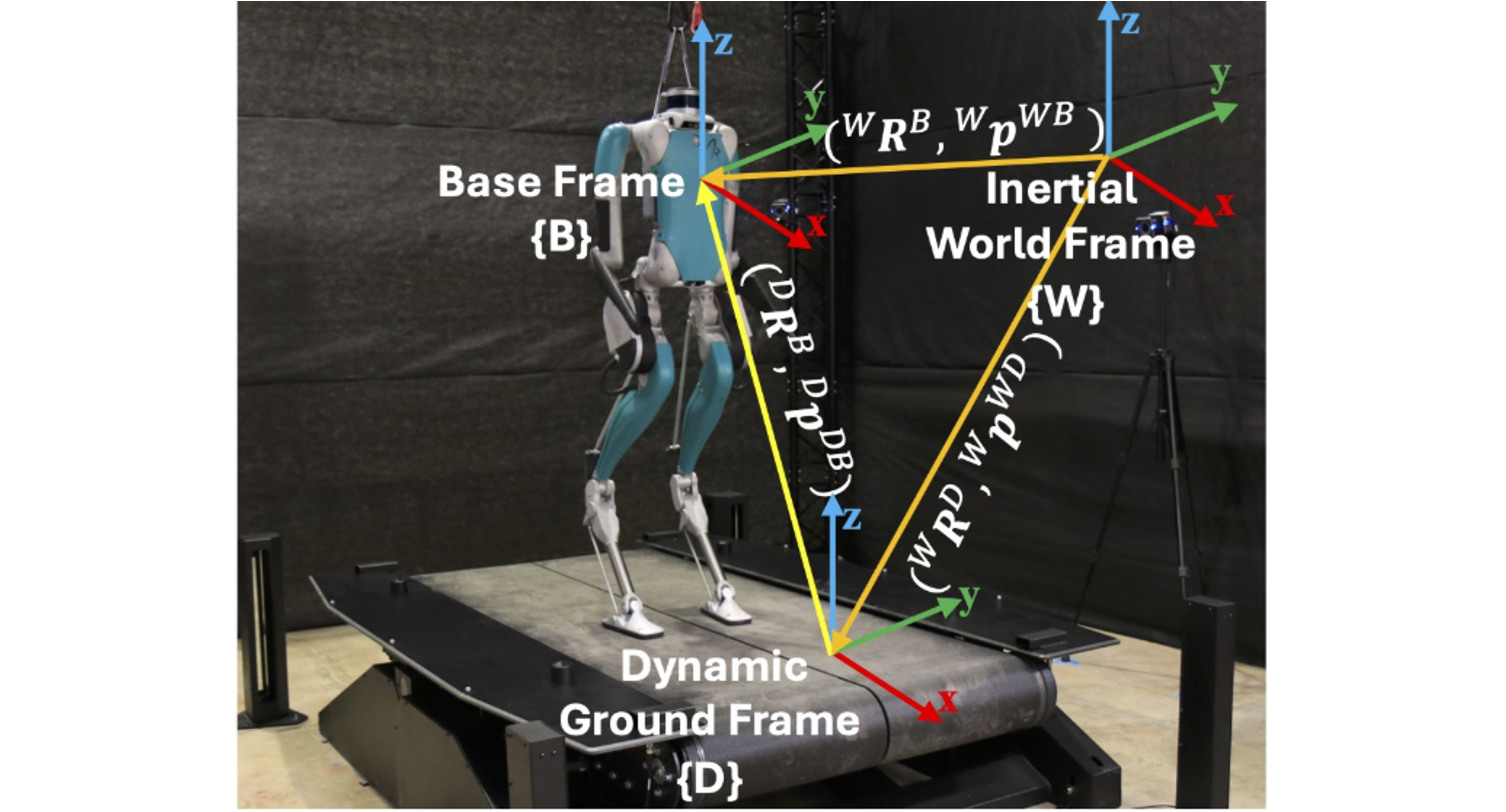 | Legged Robot State Estimation within Non-inertial Environments Zijian He, Sangli Teng, Tzu-Yuan Lin, Maani Ghaffari, and Yan Gu IEEE Conference on Decision and Control (CDC), 2024 |
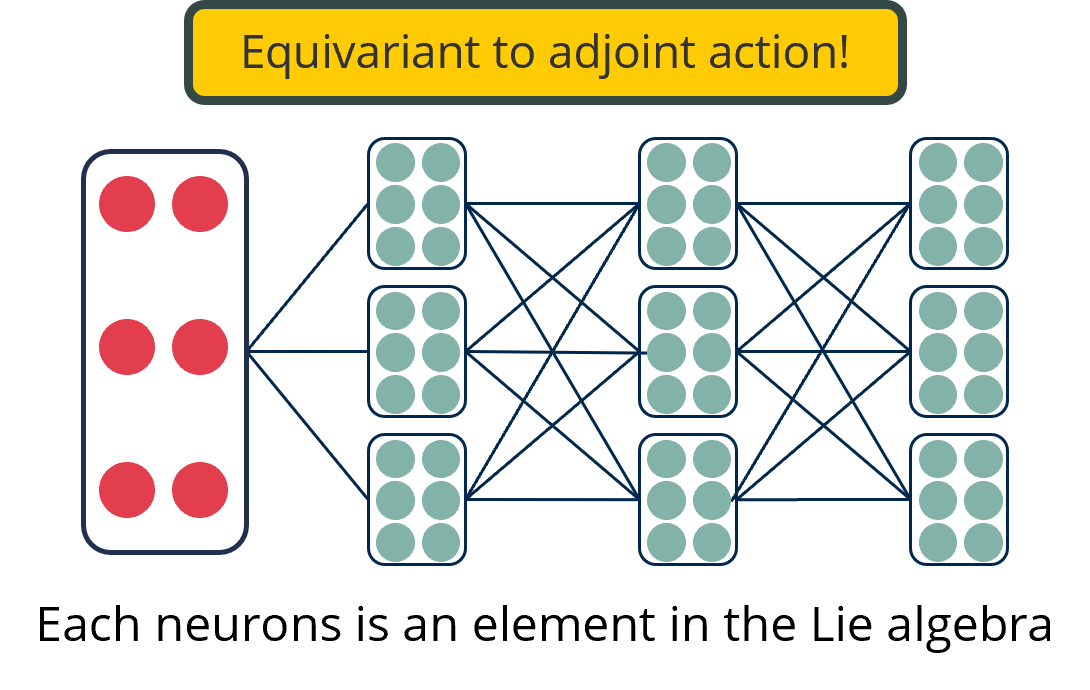 | Lie Neurons: Adjoint-Equivariant Neural Networks for Semisimple Lie Algebras Tzu-Yuan Lin*, Minghan Zhu*, and Maani Ghaffari International Conference on Machine Learning (ICML), 2024 |
 | Legged Robot State Estimation using Invariant Kalman Filtering and Learned Contact Events Tzu-Yuan Lin, Ray Zhang, Justin Yu, and Maani Ghaffari Conference on Robot Learning (CoRL), 2021 |
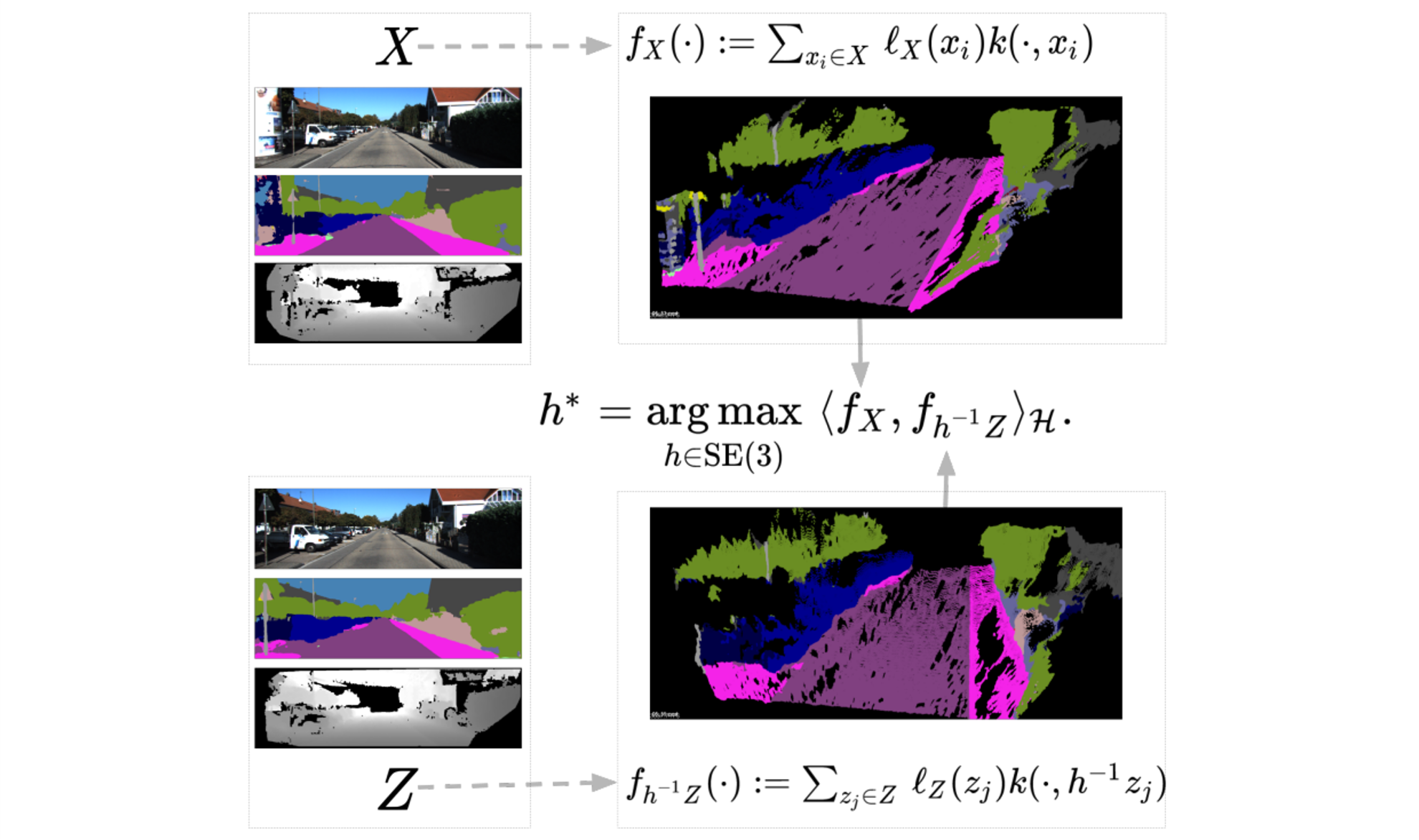 | A New Framework for Registration of Semantic Point Clouds from Stereo and RGB-D Cameras Ray Zhang, Tzu-Yuan Lin, Chien Erh Lin, Steven A. Parkison, William Clark, Jessy W. Grizzle, Ryan M. Eustice, Maani Ghaffari IEEE International Conference on Robotics and Automation (ICRA), 2021 |
